
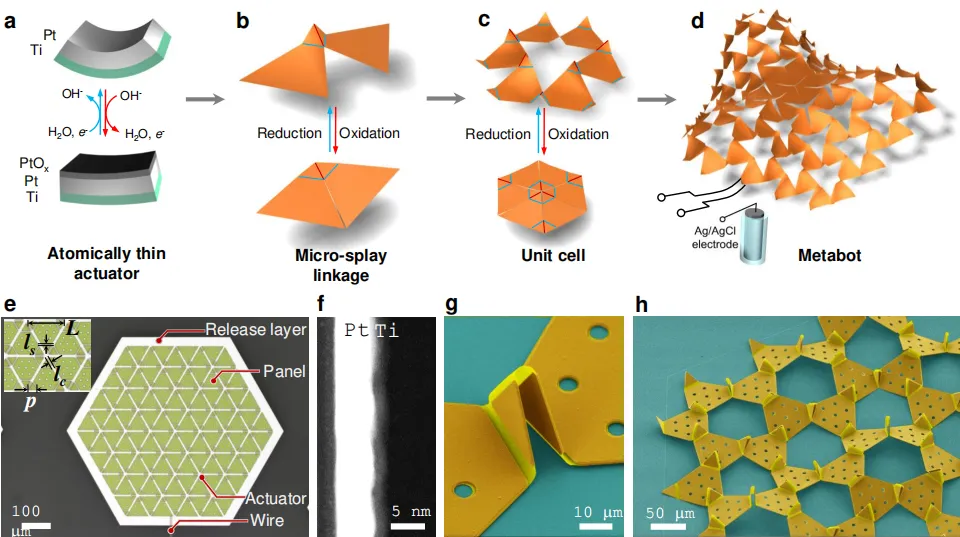
该微型机器人采用基于剪纸结构和电化学驱动微执行器的设计。它由数百个基本单元组成,包括约100块二氧化硅面板和200多个活动铰链,而铰链的厚度仅为10纳米。
通过电化学驱动方法,这些铰链可以驱动微型机器人在短短100毫秒内实现局部膨胀和收缩,最大面积变化达40%。此外,它可以改变形状并执行多种运动模式,具体取决于激活的铰链。
微型机器人的设计灵感来自于自然界中能够大规模变形的生物体,例如细胞或阿米巴原虫。
由于图元数量较多,虽然灵活性很高,但也使得控制操作变得非常困难。如何平衡机器人的灵活性和刚性是研究人员面临的挑战之一。
基于此,他们尝试采用精确的电寻址驱动方法,使这些图元能够精确地达到目标形状,并且一旦变形,它们能够按照设计的图案稳定有序地保持一定的形状,而不是随机变形。 。
需要了解的是,这种微型机器人是由机械超材料制成的。其独特之处在于,当材料在某一方向拉伸膨胀时,与其垂直的方向也会膨胀。
这种材料被称为“拉胀”,具有负泊松比,这与材料在拉伸时垂直收缩的自然趋势相反。
图丨基于剪纸结构设计的微变形机器人(来源:Nature Materials)
研究人员利用超材料的这一特性,开发出了可变形的微型机器人,并将这种机器人命名为“Metasheet Robot”,简称“Metabot”。 “这不仅是一个新名字,更代表了设计微型机器人的新理念。”刘庆坤说道。
这种基于超材料的微型机器人表现出更高的灵活性和鲁棒性。其结构由众多基元组成,与传统机器人的设计有本质区别。
传统的机器人通常只有一个身体和两条腿。一旦腿部受损,可能会丧失行走功能,而微变形机器人即使部分基元受损,仍能保持正常的作业能力。
在结构设计方面,研究人员尝试了多种形状,发现六边形结构在变形范围和自由度方面表现最好。
与四边形结构相比,六边形结构不仅变形范围较大,而且自由度适中,既不会太刚,也不会太软而难以控制。
“正是这种结构的独特性,使得这款微变形机器人在变形和运动性能方面具有显着的优势。”刘庆坤说道。
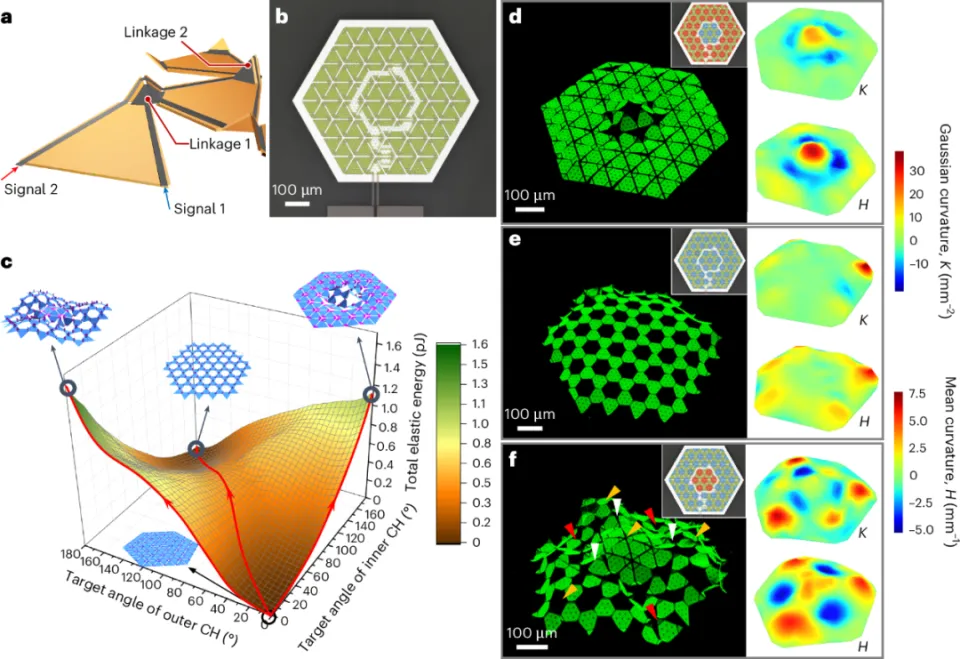
图丨微型元结构机器人变形为各种三维形状(来源:Nature Materials)
近日,Nature Materials[1]上发表了一篇相关论文,标题为“Electroniclyconfigurablemicroscopemetasheetrobots”。
上海交通大学刘庆坤副教授和康奈尔大学王伟博士为共同第一作者,康奈尔大学Itai Cohen教授为通讯作者。

图丨相关论文(来源:Nature Materials)
这种微型机器人具有体积极小、变形能力强等优点,因此在生物医学、环境监测、微流控技术等领域具有广阔的应用前景。
例如,在微型机器人表面的面板上安装带有医疗标记的传感器或微控制器,使其能够穿过人体管道等复杂狭窄的环境。
目前,微型机器人仍处于研究的早期阶段,面板上的功能尚未完全开发出来。
下一步,研究小组计划进一步提高其性能,在面板上安装更丰富的功能,如传感器、药物载体、微控制芯片等组件,实现无线控制,并通过处理器间通信实现分布式控制。 。
与此同时,研究人员正在考虑将微型机器人集成到内窥镜末端,以便通过微创手术将其输送到体内进行检测和治疗。
刘庆坤指出,这种微型机器人不仅可以释放药物,由于其强大的变形能力,甚至可以进行精准操作。 “这需要我们开发更强大的执行器,以确保机器人有足够的动力来抓取和去除病变组织,类似于软体机器人或柔性机械手的功能。”
此外,微型机器人表面可安装电极,利用电刺激对病变部位进行治疗,这将进一步增强其在微创医疗领域的应用潜力。
参考:
1.Liu, Q., Wang, W., Sinhmar, H. 等人。电子可配置的微型元片机器人。自然材料(2024)。
排版:刘亚坤
本文采摘于网络,不代表本站立场,转载联系作者并注明出处:http://mjgaz.cn/fenxiang/272790.html
