
3 月 31 日消息,在传统脑部手术里,医生一般需要移除部分头骨,以此来接触到那些难以抵达的脑部区域或者肿瘤。这种手术方式具有侵入性强以及风险高的特点,并且患者的恢复时间很漫长。不过,一项新的技术突破有希望将这一现状彻底改变。

多伦多大学牵头并联合加拿大病童医院(SickKids)开展了一个研究项目,这个项目成功地开发出了一套微型神经外科手术工具,其直径仅约 3 毫米。这套工具能够模拟外科医生的灵巧动作,精准地夹持、拉动和切割身体组织,为侵入性更小的脑部手术提供了新的工具。相关的研究论文在近日出版的《科学・机器人》杂志上发表了。
IT 之家了解到,在过去的几十年里,直径大概为 8 毫米的机器人手术工具,在人体除神经外科手术之外的其他部位的微创手术里得到了广泛的应用。但是,把这个工具缩小到适合神经外科手术的 3 毫米直径,一直是该领域所面临的技术瓶颈。
此次研发的微型工具,是通过外部磁场来实现驱动的,而非依靠传统电机。它成功地取得了这一突破。传统的机器人手术工具,是依赖于连接到电动机的电缆的,其工作原理与人类手指相似,是通过手腕处的肌肉和手部的肌腱来进行操控的。但当要把工具缩小到几毫米时,这种设计遭遇很多挑战。小型滑轮存在强度不够的问题,容易摩擦、拉伸以及断裂等。这些情况使得工具的微型化是极为困难的。
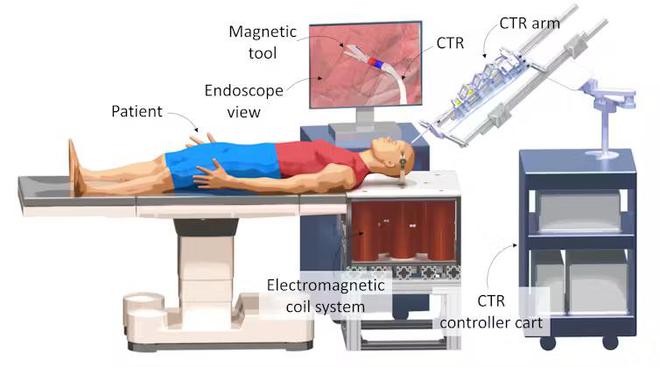
新开发的机器人手术系统包含两部分。一部分是微型手术工具,其中有抓取器、手术刀以及镊子。另一部分是“线圈手术台”,该手术台是在手术台上嵌入了多个电磁线圈。
患者头部在手术过程中会被置于手术台上,手术台上嵌入了线圈。微型工具通过一个小切口被插入脑部。医生可以通过调节线圈中的电流,精准地操控磁场,从而让工具实现抓取组织、拉动组织或切割组织的动作。
传统开颅手术中,医生凭借自身灵活的手腕转动工具并倾斜其尖端,以接触到脑部深处区域,像移除大脑中央腔内的肿瘤。这种新型机器人神经外科工具能通过“腕部”运动模拟此操作,其灵活性和精准度很突出。
在临床前试验里,研究人员对脑组织的机械特性进行了模拟。他们使用豆腐和树莓等材料,将这些材料放置在大脑模型中进行测试。实验结果表明,磁控手术刀切割出的切口是一致且狭窄的,其平均宽度仅仅在 0.3 到 0.4 毫米之间。而传统手工工具切割的切口宽度范围是 0.6 到 2.1 毫米,相比之下,磁控手术刀切割的切口更为精准。同时,抓取器的成功抓取率达到了 76%。
微型机器人手术工具在实验中表现很出色,然而将其应用于临床,还得经历一段漫长的过程。开发医疗设备,特别是手术机器人,通常需要数年乃至数十年的时间。
多伦多大学的 Eric Diller 教授领导了一项多年的研究项目,这项研究是其一部分,他是磁驱动微型机器人领域的专家。目前,研究团队正努力确保机器人手臂和磁控系统能在医院手术室中舒适安装,并且能与利用 X 射线成像的荧光镜等成像系统兼容。只有完成这些步骤后,这些工具才有望进入临床试验阶段。
本文采摘于网络,不代表本站立场,转载联系作者并注明出处:http://mjgaz.cn/fenxiang/275192.html
